
希望让语言不再成为中国人获取最新知识的障碍




一站式服务 / 简单 / 快速 / 高效
视频教程 · 在线体验
历史重大更新 |[原项目地址](https://github.com/nishiwen1214/ChatReviewer)|
|ChatImprovement|利用ChatGPT对**论文初稿进行润色、翻译等**|访问[学术版GPT](http://academic.chatwithpaper.org/) 使用||[原项目地址](https://github.com/binary-husky/chatgpt_academic)|
|ChatResponse|利用ChatGPT对**审稿人的提问进行回复**|访问[ShiwenNi/ChatResponse](https://huggingface.co/spaces/ShiwenNi/ChatResponse) 使用|
|[原项目地址](https://github.com/nishiwen1214/ChatReviewer)|
|ChatImprovement|利用ChatGPT对**论文初稿进行润色、翻译等**|访问[学术版GPT](http://academic.chatwithpaper.org/) 使用||[原项目地址](https://github.com/binary-husky/chatgpt_academic)|
|ChatResponse|利用ChatGPT对**审稿人的提问进行回复**|访问[ShiwenNi/ChatResponse](https://huggingface.co/spaces/ShiwenNi/ChatResponse) 使用| |[原项目地址](https://github.com/nishiwen1214/ChatReviewer)|
|ChatGenTitle|利用百万arXiv论文元信息训练出来的论文题目生成模型,**根据论文摘要生成合适题目**|
|[原项目地址](https://github.com/nishiwen1214/ChatReviewer)|
|ChatGenTitle|利用百万arXiv论文元信息训练出来的论文题目生成模型,**根据论文摘要生成合适题目**| |[原项目地址](https://github.com/WangRongsheng/ChatGenTitle)|
> **所有功能免费,代码开源,大家放心使用!** 关于API如何获取,首先你得有一个没有被封的ChatGPT账号,然后[获取Api Key](https://chatgpt.cn.obiscr.com/blog/posts/2023/How-to-get-api-key/) ,填入即可!
## 目录:
- [💥最新讯息](#最新讯息)
- [💫开发动机](#开发动机)
- [⛏️配置教程](#配置教程)
- [⛏️PDF全文翻译配置教程](https://github.com/kaixindelele/ChatPaper#%E4%BB%BB%E6%84%8Fpdf%E5%85%A8%E6%96%87%E7%BF%BB%E8%AF%91%E9%85%8D%E7%BD%AE%E6%95%99%E7%A8%8B)
- [👷♂️HuggingFace在线部署](#HuggingFace在线部署)
- [📄本地PDF全文翻译示例](#本地PDF全文翻译示例)
- [📄本地PDF全文总结示例](#本地PDF全文总结示例)
- [📄全文总结示例](#全文总结示例)
- [👁️🗨️使用技巧](#使用技巧)
- [🛠️常见报错](#常见报错)
- [💐项目致谢](#项目致谢)
- [🌟赞助我们](#赞助我们)
- [🌈Starchart](#Starchart)
- [🏆Contributors](#Contributors)
## 最新讯息
- 🌟*2023.07.23*: [MasterYip](https://github.com/MasterYip) 同学开源了 [ChatPaper2Xmind](https://github.com/MasterYip/ChatPaper2Xmind)!
将论文PDF通过Chat一键生成 图片+公式的简要XMind笔记
- 🌟*2023.07.22*: 增加全新的本地PDF全文翻译功能。
- 🌟*2023.07.21*: 仓库的文件做了一个整理,可能会有些路径和bug,正在修复中。
- 🌟*2023.07.09*: 师弟[red-tie](https://github.com/red-tie)在[auto-draft](https://github.com/CCCBora/auto-draft)的基础上,优化了一款[一键文献综述](https://github.com/kaixindelele/ChatPaper/tree/main/auto_survey)的功能. 适用于大家对具体某个领域快速掌握,并且支持直接生成中文文献调研报告。文件配置简单,欢迎大家使用和反馈!
- 🌟*2023.07.05*: 昨天我做了一个新的小玩具:[ChatSensitiveWords](https://github.com/kaixindelele/ChatSensitiveWords),利用LLM+敏感词库,来自动判别是否涉及敏感词。已经在学术版GPT网页端上线,欢迎LLM的开发者一起完善这个工作。
- 🌟*2023.04.30*: **唯一官方网站:**[https://chatpaper.org/](https://chatpaper.org/) ,以及小白教程【ChatPaper网页版使用小白教程-哔哩哔哩】 https://b23.tv/HpDkcBU, 第三方文档:https://chatpaper.readthedocs.io .
- 🌟*2023.04.22*: 为了庆祝ChatPaper获得一万⭐,我们将联合两位同学,推出两个AI辅助文献总结工具,第一个是[auto-draft](https://github.com/CCCBora/auto-draft),AI自动搜集整理出文献总结!
- 🌟*2023.04.17*: 为了降低学术伦理风险,我们为Chat_Reviewer增加了复杂的文字注入,效果如图:[示例图](https://github.com/kaixindelele/ChatPaper/blob/main/images/reviews.jpg) ,希望各位老师同学在使用的时候,一定要注意学术伦理和学术声誉,不要滥用工具。如果谁有更好的方法来限制少数人的不规范使用,欢迎留言,为科研界做一份贡献。
- 🌟*2023.03.31*: 目前已经离线总结了3w+的CCF-A会议论文了,以后大家可以不用等那么久了!
- 🌟*2023.03.28*: 荣胜同学今天发布了一个非常有意思的工作[ChatGenTitle](https://github.com/WangRongsheng/ChatGenTitle),提供摘要生成标题,基于220wArXiv论文的数据微调的结果!
- 🌟*2023.03.23*: chat_arxiv.py可以从arxiv网站,根据关键词,最近几天,几篇论文,直接爬取最新的领域论文了!解决了之前arxiv包的搜索不准确问题!
- 🌟*2023.03.23*: ChatPaper终于成为完成体了!现在已经有论文总结+论文润色+论文分析与改进建议+论文审稿回复等功能了!
## 开发动机
|[原项目地址](https://github.com/WangRongsheng/ChatGenTitle)|
> **所有功能免费,代码开源,大家放心使用!** 关于API如何获取,首先你得有一个没有被封的ChatGPT账号,然后[获取Api Key](https://chatgpt.cn.obiscr.com/blog/posts/2023/How-to-get-api-key/) ,填入即可!
## 目录:
- [💥最新讯息](#最新讯息)
- [💫开发动机](#开发动机)
- [⛏️配置教程](#配置教程)
- [⛏️PDF全文翻译配置教程](https://github.com/kaixindelele/ChatPaper#%E4%BB%BB%E6%84%8Fpdf%E5%85%A8%E6%96%87%E7%BF%BB%E8%AF%91%E9%85%8D%E7%BD%AE%E6%95%99%E7%A8%8B)
- [👷♂️HuggingFace在线部署](#HuggingFace在线部署)
- [📄本地PDF全文翻译示例](#本地PDF全文翻译示例)
- [📄本地PDF全文总结示例](#本地PDF全文总结示例)
- [📄全文总结示例](#全文总结示例)
- [👁️🗨️使用技巧](#使用技巧)
- [🛠️常见报错](#常见报错)
- [💐项目致谢](#项目致谢)
- [🌟赞助我们](#赞助我们)
- [🌈Starchart](#Starchart)
- [🏆Contributors](#Contributors)
## 最新讯息
- 🌟*2023.07.23*: [MasterYip](https://github.com/MasterYip) 同学开源了 [ChatPaper2Xmind](https://github.com/MasterYip/ChatPaper2Xmind)!
将论文PDF通过Chat一键生成 图片+公式的简要XMind笔记
- 🌟*2023.07.22*: 增加全新的本地PDF全文翻译功能。
- 🌟*2023.07.21*: 仓库的文件做了一个整理,可能会有些路径和bug,正在修复中。
- 🌟*2023.07.09*: 师弟[red-tie](https://github.com/red-tie)在[auto-draft](https://github.com/CCCBora/auto-draft)的基础上,优化了一款[一键文献综述](https://github.com/kaixindelele/ChatPaper/tree/main/auto_survey)的功能. 适用于大家对具体某个领域快速掌握,并且支持直接生成中文文献调研报告。文件配置简单,欢迎大家使用和反馈!
- 🌟*2023.07.05*: 昨天我做了一个新的小玩具:[ChatSensitiveWords](https://github.com/kaixindelele/ChatSensitiveWords),利用LLM+敏感词库,来自动判别是否涉及敏感词。已经在学术版GPT网页端上线,欢迎LLM的开发者一起完善这个工作。
- 🌟*2023.04.30*: **唯一官方网站:**[https://chatpaper.org/](https://chatpaper.org/) ,以及小白教程【ChatPaper网页版使用小白教程-哔哩哔哩】 https://b23.tv/HpDkcBU, 第三方文档:https://chatpaper.readthedocs.io .
- 🌟*2023.04.22*: 为了庆祝ChatPaper获得一万⭐,我们将联合两位同学,推出两个AI辅助文献总结工具,第一个是[auto-draft](https://github.com/CCCBora/auto-draft),AI自动搜集整理出文献总结!
- 🌟*2023.04.17*: 为了降低学术伦理风险,我们为Chat_Reviewer增加了复杂的文字注入,效果如图:[示例图](https://github.com/kaixindelele/ChatPaper/blob/main/images/reviews.jpg) ,希望各位老师同学在使用的时候,一定要注意学术伦理和学术声誉,不要滥用工具。如果谁有更好的方法来限制少数人的不规范使用,欢迎留言,为科研界做一份贡献。
- 🌟*2023.03.31*: 目前已经离线总结了3w+的CCF-A会议论文了,以后大家可以不用等那么久了!
- 🌟*2023.03.28*: 荣胜同学今天发布了一个非常有意思的工作[ChatGenTitle](https://github.com/WangRongsheng/ChatGenTitle),提供摘要生成标题,基于220wArXiv论文的数据微调的结果!
- 🌟*2023.03.23*: chat_arxiv.py可以从arxiv网站,根据关键词,最近几天,几篇论文,直接爬取最新的领域论文了!解决了之前arxiv包的搜索不准确问题!
- 🌟*2023.03.23*: ChatPaper终于成为完成体了!现在已经有论文总结+论文润色+论文分析与改进建议+论文审稿回复等功能了!
## 开发动机
开发动机细节
技术原理细节配置教程细节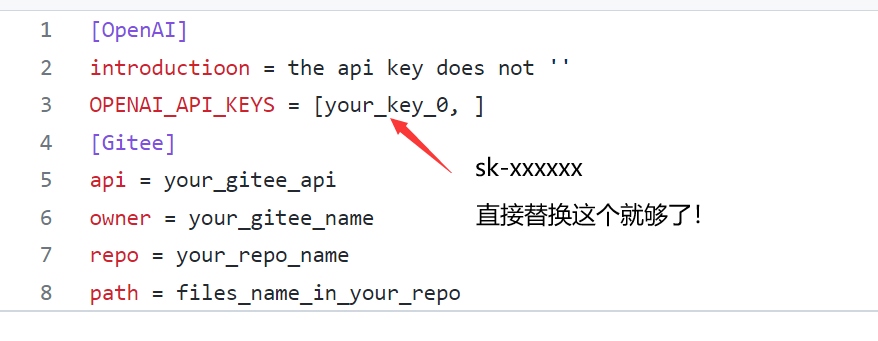

Flask配置教程Docker配置教程细节HuggingFace在线部署细节查看本地PDF全文翻译示例查看本地PDF全文总结示例示例查看全文总结结果Title: Diffusion Policy: Visuomotor Policy Learning via Action Diffusion 中文标题: 通过行为扩散的视觉运动策略学习
Authors: Haonan Lu, Yufeng Yuan, Daohua Xie, Kai Wang, Baoxiong Jia, Shuaijun Chen
Affiliation: 中南大学
Keywords: Diffusion Policy, Visuomotor Policy, robot learning, denoising diffusion process
Urls: http://arxiv.org/abs/2303.04137v1, Github: None
Summary:
(1): 本文研究的是机器人视觉动作策略的学习。机器人视觉动作策略的学习是指根据观察到的信息输出相应的机器人运动动作,这一任务较为复杂和具有挑战性。
(2): 过去的方法包括使用高斯混合模型、分类表示,或者切换策略表示等不同的动作表示方式,但依然存在多峰分布、高维输出空间等挑战性问题。本文提出一种新的机器人视觉运动策略模型 - Diffusion Policy,其结合了扩散模型的表达能力,克服了传统方法的局限性,可以表达任意分布并支持高维空间。本模型通过学习代价函数的梯度,使用随机Langevin动力学算法进行迭代优化,最终输出机器人动作。
(3): 本文提出的机器人视觉动作策略 - Diffusion Policy,将机器人动作表示为一个条件去噪扩散过程。该模型可以克服多峰分布、高维输出空间等问题,提高了策略学习的表达能力。同时,本文通过引入展望控制、视觉诱导和时间序列扩散变换等技术,继续增强了扩散策略的性能。
(4): 本文的方法在11个任务上进行了测试,包括4个机器人操纵基准测试。实验结果表明,Diffusion Policy相对于现有的机器人学习方法,表现出明显的优越性和稳定性,平均性能提升了46.9%。

7.Methods: 本文提出的视觉动作策略学习方法,即Diffusion Policy,包括以下步骤:
(1) 建立条件去噪扩散过程:将机器人动作表示为一个含有高斯噪声的源的条件随机扩散过程。在该过程中,机器人状态作为源,即输入,通过扩散过程输出机器人的运动动作。为了将其变为条件随机扩散模型,我们加入了代价函数,它在路径积分中作为条件。
(2) 引入随机Langevin动力学:将学习代价函数的梯度转换为基于随机Langevin动力学的迭代优化问题。该方法可以避免显示计算扩散过程,并且可以满足无导数优化器的要求,使其受益于渐近高斯性质以及全局收敛性质。
(3) 引入扩散策略增强技术:使用展望控制技术,结合决策网络,对由扩散产生的动作进行调整,从而增强策略的性能。同时,引入视觉诱导以及时间序列扩散变换,来进一步提高扩散策略的表达能力。
(4) 在11个任务上进行测试:测试结果表明,该方法相对于现有的机器人学习方法,在机器人操纵基准测试中表现出明显的优越性和稳定性,平均性能提升了46.9%。
7.Conclusion:
(1):本文研究了机器人视觉动作策略的学习方法,提出了一种新的机器人视觉运动策略模型 - Diffusion Policy,通过引入扩散模型的表达能力,克服了传统方法的局限性,可以表达任意分布并支持高维空间。实验结果表明,该方法在11个任务上均表现出明显的优越性和稳定性,相对于现有机器人学习方法,平均性能提高了46.9%,这一研究意义巨大。
(2):虽然本文提出了一种新的机器人视觉动作策略学习方法,并在实验中取得了良好的表现,但该方法的优化过程可能比较耗时。此外,该方法的性能受到多种因素的影响,包括演示的质量和数量、机器人的物理能力以及策略架构等,这些因素需在实际应用场景中加以考虑。
(3):如果让我来推荐,我会给这篇文章打9分。该篇文章提出的Diffusion Policy方法具有较高的可解释性、性能表现良好、实验结果稳定等优点,能够为机器人视觉动作策略学习等领域带来很大的启发与借鉴。唯一的不足可能是方法的优化过程需要投入更多的时间和精力。
查看使用技巧查看常见报错